
日本熊谷组与东京工业高等专科学校联合开发了一项无人化施工VR技术。利用该技术,作业人员可根据施工影像实时远程控制施工机械的倾斜与振动,并可获取施工现场传来的声响,进而提高其远程操控施工机械的操作体验,同时还能提高施工的安全性及作业效率。
对于发生自然灾害的施工现场,无人化施工是防止次生灾害的有效手段。但与现场操作相比,远程操控很难把握施工机械的实际倾斜与振动情况。例如,挖掘机在抓取沙土情况下的回转时,重心的变化会导致机身倾斜,甚至发生倾翻。另外,履带式搬运车等搬运机械在地面起伏较多的工程专用道路上行驶亦是如此,意外的左右倾斜易增加车辆倾翻的风险。因此需保持施工机械的水平作业。而仅通过俯瞰影像的远程操作很难把握施工机械的倾斜度。基于此,无人化施工VR技术得以开发。
该项技术采用东京工业高等专科学校开发的体育赛事观看系统,结合在施工机械一侧设置的360°全景摄像头和加速度传感器,可将施工机械的实时动态(包括现场影像和声音)传至远程驾驶舱内。影像将投放于VR头戴式显示器上,而作业人员可在有声条件下远程操控施工机械。如此一来,通过向作业人员提供接近现场实际的环境,即使在坡地也能安全有效地进行远程操作。该技术荣获第七届日本制造业大奖的内阁总理大臣奖。
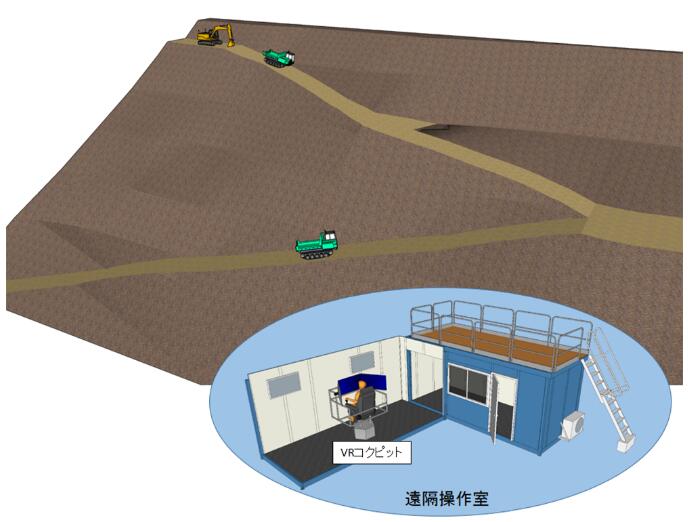
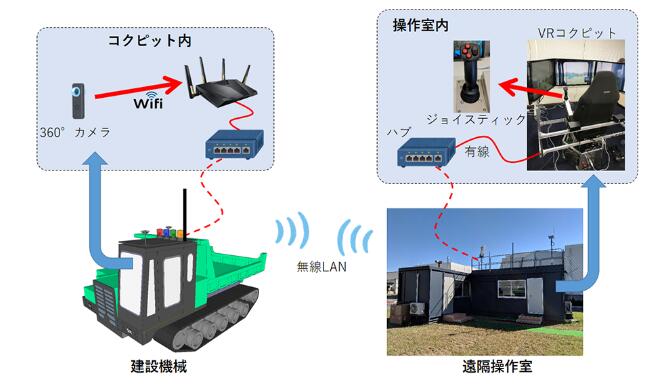
系统结构分为施工机械和远程操作室两部分。在建设机械方面,将360度照相机和加速度传感器安装在驾驶舱内,记录操作视线的影像和声音以及建设机械的动作(加速度传感器输出),并进行传送。远程操作系统则由远程操作盘、三自由度遥控操纵杆和头戴式显示器组成,使用遥控杆操作建设机械,通过头戴式显示器显示建设机械360度影像的同时,根据建设机械的动作数据驱动机械运动。
该项技术已在熊谷组技术研究所的室外实验场完成了实证性试验,并确认了其有效性。
未来,公司还将对该技术进一步改进,以提高远程操作的工作效率。
(声明:文章转载自公众号:中铁科技情报中心)